
Research roundup: GNSS in urban canyons
September 5, 2023
GNSS researchers presented hundreds of papers at the 2022 ION GNSS+ conference, which took place Sept. 19-23, 2022, in Denver, Colorado, and virtually.
Read More
GNSS researchers presented hundreds of papers at the 2022 ION GNSS+ conference, which took place Sept. 19-23, 2022, in Denver, Colorado, and virtually.

ION’s Joint Navigation Conference program told the story of the GNSS/PNT community’s interests and concerns, focusing on technical advances in PNT.
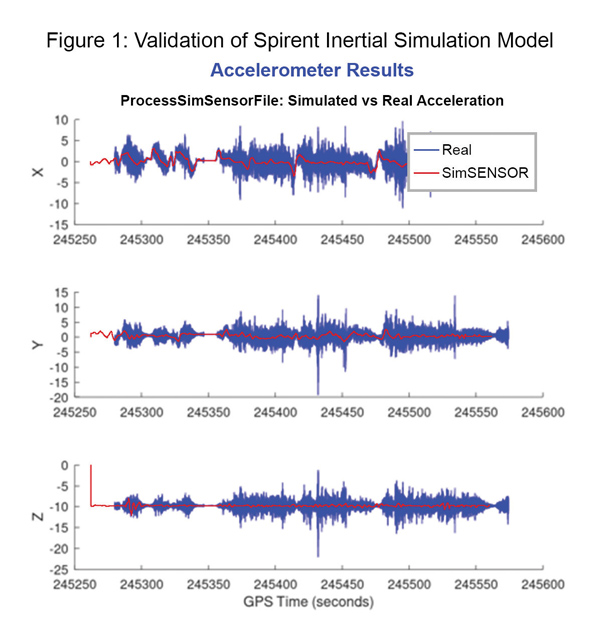
We discussed complementary PNT with Roger Hart, head of engineering and Jeff Martin, head of sales at Spirent Federal.
The European Space Agency (ESA) is issuing a call for ideas to overcome GNSS service gaps in urban […]
Swift Navigation‘s new Precision GNSS Module (PGM) is now available. The PGM module is designed to offer fast […]

Quectel Wireless Solutions Co. Ltd., in association with STMicroelectronics, has released the LG69T module, an automotive-grade dual-band high-precision […]

How will wireless technologies most significantly drive change and innovation in the surveying industry? “GNSS by design, by […]






Follow Us