Innovation: Clarifying the ambiguities

Examining the interoperability of precise point positioning products
By Garrett Seepersad and Sunil Bisnath

INNOVATION INSIGHTS with Richard Langley
CARRIER PHASE. We’ve all heard the term and recognize it as a more precise observable for GNSS positioning, navigation and timing than code phase, more commonly called the pseudorange. The carrier-phase measurement is the phase of the received continuous radio-frequency sinusoidal waveform that “carries” the pseudorandom noise ranging codes and the navigation messages. The underlying carrier of a satellite signal can be recovered and its phase measured at regular intervals by the receiver once it locks onto the signal.
As long as there is no interruption in the carrier tracking, the receiver can generate a continuous series of measurements of the cumulative phase or cycle count including fractional cycles. The initial value at signal lock-on is arbitrary. Ideally, it would equal the exact number of cycles (and fractional cycle) of the waveform between the antenna of the satellite and the antenna of the receiver.
If that was the case, then we could simply multiply that cycle count by the wavelength of the carrier in meters, say, and we would have the initial geometric distance (or range) to the satellite. Then we could update this value as time progresses with the receiver’s measurements and have a continuous sequence of range values, which, when corrected for satellite and receiver clock errors and other effects, would allow the receiver’s position to be accurately determined. But because we don’t know the true initial cycle count, the carrier-phase measurements are ambiguous by a constant integer amount (when measured in cycles). This characteristic of the observable is referred to as the integer ambiguity.
It was realized early in the development of GPS, that if the integer ambiguity of carrier-phase measurements could be resolved, we would have a very precise observable for positioning, navigation and timing, some two orders of magnitude more precise than the code-based pseudorange. Instead of measurement precisions of tens of centimeters, we could have precisions of tenths of millimeters.
In the early 1980s using the few test GPS satellites in orbit at the time, surveyors and geodesists developed a series of clever techniques that allowed them to make use of carrier-phase measurements to determine the baseline between pairs of receivers by estimating combinations of the ambiguities as unknowns along with the receiver relative coordinates or, for short baseline work, use a calibration procedure before starting a survey.
Now jump forward a few decades. While it is still common practice to double difference carrier-phase measurements between pairs of satellites and pairs of receivers to determine relative receiver coordinates, the technique of precise point positioning or PPP, which uses carrier-phase (and pseudorange) measurements from a single user receiver, is growing in popularity. But, the integer ambiguity problem is still with us and has to be addressed by the analysis software. The ambiguities are often estimated as real- rather than integer-valued quantities, in part because of the contribution of satellite hardware biases to the carrier-phase measurements.
However, it is possible to resolve the ambiguities to integer values by using PPP ambiguity resolution products distributed by several research organizations. In this month’s column, we take a look at the interoperability of these products for increasing the reliability and precision of position solutions and reducing the time required for a solution to converge to a required level of accuracy.
Ambiguity resolution in precise point positioning (hereafter, PPP-AR) requires that hardware delays within the GPS measurements be mitigated, which will then allow for resolution of the integer ambiguities within the carrier-phase measurements. Resolution of these ambiguities converts the carrier-phases into precise “range” measurements, with measurement noise at the centimeter-to-millimeter level compared to the meter-to-decimeter level of the C/A- and P(Y)-code pseudoranges. If the ambiguities could be isolated and estimated as integers, then that information could be exploited to accelerate PPP convergence to provide, for example, few-centimeter horizontal positioning accuracy within tens of minutes or even minutes from a cold start.
Integer ambiguity resolution of measurements from a single receiver can be implemented by applying additional satellite products, where the fractional component — representing the satellite hardware delay — has been separated from the integer ambiguities in a network solution. One method of deriving such products is to estimate the satellite hardware delay by averaging the fractional parts of steady-state real-valued or floating-point (float) ambiguity estimates, and the other is to estimate the receiver clock offset in the pseudorange and carrier-phase measurements independently by fixing the undifferenced ambiguities to integers in advance.
Similar positioning performances have been demonstrated among three approaches of different groups or agencies using the two methods: FCB (Fractional Cycle Bias), IRC (Integer Recovery Clock) and DC (Decoupled Clock). For the PPP user, the mathematical model is similar. The different PPP-AR products contain the same information and, as a result, should allow for one-to-one transformations, allowing interoperability of the PPP-AR products. The advantage of interoperability of the various products is to allow the PPP user to transform independently generated products to obtain multiple fixed solutions of comparable precision and accuracy, with no changes to the core PPP user software. An overview of the different providers and their products is presented in FIGURE 1.

FIGURE 1. Public providers of PPP-AR products. (Source: Richard Langley)
The ability to use different products would increase the reliability of a positioning solution in real-time processing, for example. If there was an outage in the generation of a particular PPP-AR product, a user could instantly switch streams to a different provider. The research presented in this article examines the PPP-AR products generated from the FCB and IRC models that have been transformed into the DC format and applied within a PPP user solution. The novelty of the research is the solution analysis using the transformed product. We examine the convergence time (time-to-first-fix and time to a pre-defined performance level), position precision (repeatability), position accuracy and solution outliers. The temporal and spatial behavior of these estimated terms is examined for the different products applied to understand the unmodeled effects responsible for incorrect solution fixes.
The Role of PPP-AR Products
The standard GPS pseudorange ( ![]() and
and ![]() ) and carrier-phase (
) and carrier-phase (![]() ) observation equations are given by
) observation equations are given by
 (1)
(1)
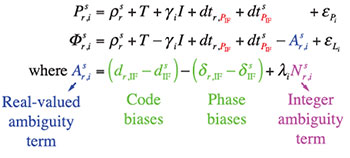
where i denotes the frequency-dependent GPS measurements for frequencies L1 or L2, s represents the tracked satellite, r represents the receiver, ![]() is the geometric range between the satellite s and the user position, T is the tropospheric delay,
is the geometric range between the satellite s and the user position, T is the tropospheric delay, ![]() is the first order slant ionospheric delay, γi is the frequency dependent coefficient, dts is the satellite clock and
is the first order slant ionospheric delay, γi is the frequency dependent coefficient, dts is the satellite clock and ![]() is the pseudorange hardware delay.
is the pseudorange hardware delay. ![]() is the ambiguity term and
is the ambiguity term and ![]() is the carrier-phase hardware delay, both of which are expressed in cycles and scaled by the wavelength λi . The error sources can be grouped into two main components, the geometric parameters and the timing parameters. Included in the timing parameters are the clock offsets and the hardware delay terms. Understanding the role of the hardware delays is critical in isolating the integer ambiguities.
is the carrier-phase hardware delay, both of which are expressed in cycles and scaled by the wavelength λi . The error sources can be grouped into two main components, the geometric parameters and the timing parameters. Included in the timing parameters are the clock offsets and the hardware delay terms. Understanding the role of the hardware delays is critical in isolating the integer ambiguities.
The following equations illustrate the effects of not mitigating the hardware delay. The set of equations was simplified by combining the clock and hardware delay parameters. Processing the carrier-phase measurements with the pseudoranges (code measurements) ensures that the pseudoranges provide a reference for the carrier-phase measurements and for the clock parameters. An implication of this is the manifestation of the hardware delay present in both the estimated clock parameters and the ambiguities.
 (2)
(2)
By not mitigating the hardware delay terms (![]() and
and![]() ), they are absorbed within the estimated ambiguity terms, rendering the integer nature of the ambiguity term inaccessible. The user observation equations do not contain sufficient information to solve for an integer-ambiguity-resolved user position. Ambiguity resolution would only become possible if information about the satellite hardware delays were provided to the user. The receiver hardware delay can be removed by single differencing (between satellites).
), they are absorbed within the estimated ambiguity terms, rendering the integer nature of the ambiguity term inaccessible. The user observation equations do not contain sufficient information to solve for an integer-ambiguity-resolved user position. Ambiguity resolution would only become possible if information about the satellite hardware delays were provided to the user. The receiver hardware delay can be removed by single differencing (between satellites).
In the following section, we present an overview of the different public providers of products that enable PPP-AR, their products and how they are applied to the PPP user equations.
Public PPP-AR Products
Currently, there are three main public providers of products that enable PPP-AR. These are Scripps Institution of Oceanography, which provides regional real-time FCB products; Natural Resources Canada (NRCan), which provides post-processed and real-time DC products; and Centre National d’Etudes Spatiales (CNES), which provides post-processed and real-time IRC products.
FCB Model. The initial application of ambiguity resolution to PPP was the Uncalibrated Phase Delay (UPD) model, now called the Fractional Cycle Bias (FCB) model. The FCB method estimates the hardware delay by averaging the fractional parts of the steady-state float ambiguity estimates to be removed from common satellite clock estimates. The FCB products consist of ![]() ,
, ![]() and
and ![]() , where WN indicates the Melbourne-Wübbena (widelane ambiguity) combination and IF indicates the ionosphere-free linear combination.
, where WN indicates the Melbourne-Wübbena (widelane ambiguity) combination and IF indicates the ionosphere-free linear combination.
DC Model. The underlying concept of the decoupled clock model is that the carrier-phase and pseudorange (code) measurements are not synchronized with each other at an equivalent level of precision. The timing of the different observables must be considered separately if they are to be processed together rigorously. The decoupled clock model is a reformulation of the ionosphere-free carrier-phase and pseudorange observation equations. When combined with the narrowlane pseudorange and the widelane phase, ambiguity resolution is possible. The DC products transmitted to the user are ![]() ,
, ![]() and
and ![]() .
.
IRC Model. The integer recovery clocks estimate constant daily widelane pseudorange/carrier-phase hardware delays by averaging arc-dependent estimates. Using float-solution estimates of the range parameters, narrowlane ambiguity resolution is performed and the ionosphere-free satellite carrier-phase clocks are estimated. In 2014, the format of the IRC products was changed from ![]() ,
,![]() and
and ![]() to a state-space uncombined representation, such that the satellite hardware delay is provided for each observable (
to a state-space uncombined representation, such that the satellite hardware delay is provided for each observable (![]() ,
, ![]() ) and satellite pseudorange clock (
) and satellite pseudorange clock (![]() ).
).
Summary. The three publicly provided products to enable real-time PPP-AR are listed in TABLE 1 along with their primary characteristics. The table summarizes the various measurements used, different products transmitted and the varying data rate of the transmitted products.

TABLE 1. Comparison of different publicly provided real-time products to enable PPP-AR.
Product Transformation
While the different strategies (FCB, FC, IRC) make different assumptions, there are fundamental similarities among them. The mathematical models for the PPP user are similar, as the different products contain the same information and as a result would allow for a one-to-one transformation. The following sections examine the transformation matrix used to transform the IRC and FCB products to the DC format (see Figure 2.)
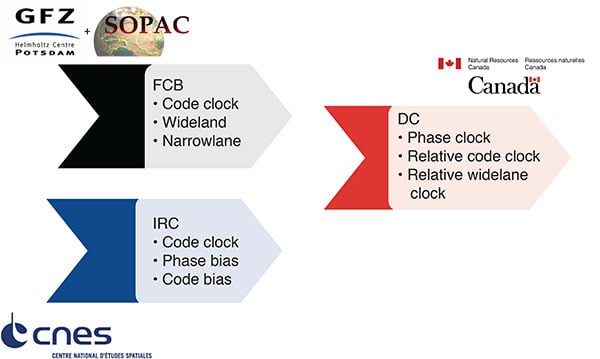
FIGURE 2. Transformation of FCB and IRC products to DC input format.
FCB. The FCB products consist of ![]() ,
, ![]() and
and ![]() , which are estimated in the network solution using International GNSS Service (IGS) ultra-rapid orbit and clock products. The fundamental difference between the FCB and DC products is that
, which are estimated in the network solution using International GNSS Service (IGS) ultra-rapid orbit and clock products. The fundamental difference between the FCB and DC products is that ![]() is not determined in the DC method, but assimilated within the clock estimates. Also,
is not determined in the DC method, but assimilated within the clock estimates. Also, ![]() is assumed constant over a 48-hour time period, whereas in the DC method
is assumed constant over a 48-hour time period, whereas in the DC method ![]() the is neither constrained nor smoothed. Here is the transformation matrix used to transform from FCB to the DC model:
the is neither constrained nor smoothed. Here is the transformation matrix used to transform from FCB to the DC model:
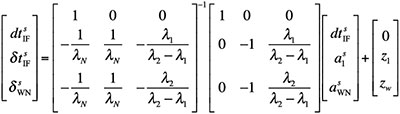 (3)
(3)
where z1 is the single-differenced L1 ambiguity and zw is the single-differenced widelane ambiguity.
IRC. The original IRC products used a decoupled-like approach, where independent clocks (![]() and
and ![]() ) were transmitted for the pseudorange and carrier-phase measurements and widelane satellite hardware delays (
) were transmitted for the pseudorange and carrier-phase measurements and widelane satellite hardware delays (![]() ) were estimated. A redefined model was presented in 2014, where a state-space approach was adopted such that one phase bias per phase observable (
) were estimated. A redefined model was presented in 2014, where a state-space approach was adopted such that one phase bias per phase observable ( ![]() and
and ![]() ) was identified and broadcast. The primary benefit of such an approach is interoperability, allowing the network and user side to implement different ambiguity resolution methods. Here is the transformation matrix used to transform from IRC to the DC model:
) was identified and broadcast. The primary benefit of such an approach is interoperability, allowing the network and user side to implement different ambiguity resolution methods. Here is the transformation matrix used to transform from IRC to the DC model:
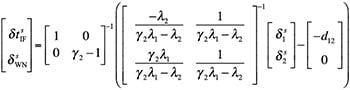 (4)
(4)
where d12 represents ![]() .
.
Analysis of Transformed Products. In FIGURES 3 to 5, we present the FCB and IRC products transformed to the DC format. The presented format was selected because it represents the nature of the transmitted real-time DC products. The philosophy of the DC model refers to the satellite hardware delay as an unmodeled timing error and, as such, the satellite carrier-phase clocks in Figure 3 are in units of seconds and in Figures 4 and 5 are in units of nanoseconds. Nanoseconds were selected because of the magnitude of the relative satellite pseudorange and widelane clock error, as well as being more bandwidth efficient.

FIGURE 3. Transformed FCB and IRC satellite carrier-phase clock correction on day-of-year 28 of 2015 for PRN 10. DC was included for comparison.
Figure 3 illustrates the FCB and IRC products transformed to the DC satellite carrier-phase clock. The satellite-clock corrections presented were not differenced with respect to a reference satellite, to illustrate their differences in an absolute nature. If the clocks are differenced, in a relative nature, they are equivalent. The data gaps in the FCB products are expected because of the regional nature of the products. Unlike the DC and IRC products, the FCB pseudorange clocks illustrate different trends such as those between hours 3 and 4. The noise illustrated in the IRC clock can be removed either by filtering or by differencing with respect to another satellite clock.
In Figure 4, we present the relative satellite clock error ( ![]() −
− ![]() ) for the transformed FCB (upper subplot) and IRC (lower subplot) products. For the original DC product (middle subplot), a simple moving average filter was applied with a bin size of five minutes to reduce the noise and illustrate the underlying equipment delay. The relative satellite clock error represents the difference between the pseudorange and carrier-phase clocks. The distinct differences of the products are easily visible, such as the filtering present within FCB and IRC products in contrast to the DC. The underlying relative satellite clock error is also significantly different in contrast to the DC product, such that FCB and IRC have an average relative satellite clock error of -0.041 ± 0.101 nanoseconds and -0.645 ± 0.005 nanoseconds, respectively, whereas the DC has an average of 8.465 ± 1.546 nanoseconds.
) for the transformed FCB (upper subplot) and IRC (lower subplot) products. For the original DC product (middle subplot), a simple moving average filter was applied with a bin size of five minutes to reduce the noise and illustrate the underlying equipment delay. The relative satellite clock error represents the difference between the pseudorange and carrier-phase clocks. The distinct differences of the products are easily visible, such as the filtering present within FCB and IRC products in contrast to the DC. The underlying relative satellite clock error is also significantly different in contrast to the DC product, such that FCB and IRC have an average relative satellite clock error of -0.041 ± 0.101 nanoseconds and -0.645 ± 0.005 nanoseconds, respectively, whereas the DC has an average of 8.465 ± 1.546 nanoseconds.
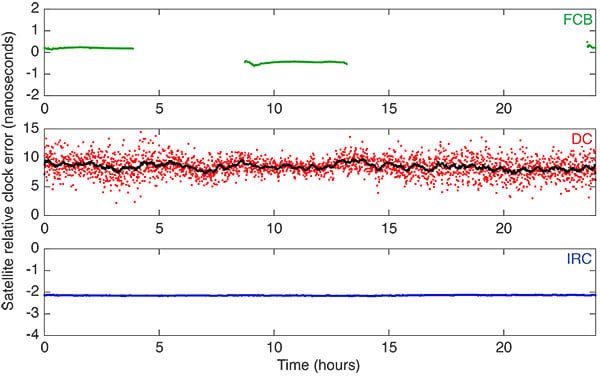
FIGURE 4. Transformed FCB and IRC products to code-phase relative clock correction on day-of-year 28 of 2015 for PRN 10. DC was included for comparison. Linear trend has been removed.
Figure 5 shows the relative satellite widelane clock error for the transformed FCB (upper subplot) and IRC (lower subplot) products. For the original DC product (middle subplot), a simple moving average filter was applied with a bin size of five minutes, to reduce the noise and illustrate the underlying equipment delay. The relative satellite clock error represents the difference between the widelane clocks and phase clocks. Similar to the relative satellite clock error, the differences in the transformed relative satellite widelane clock error are noticeable. As expected, the transformed FCB has a constant widelane estimate of -0.24 nanoseconds, whereas the transformed IRC and DC have an average widelane estimate of 0.0589 ± 0.002 and 3.6704 ± 0.34 nanoseconds, respectively.
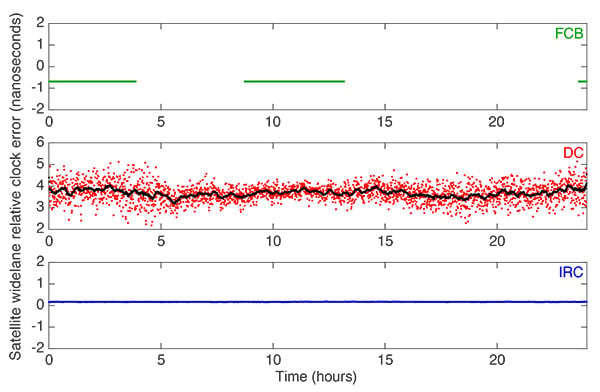
FIGURE 5. Transformed FCB and IRC products to code-phase relative widelane clock correction on day-of-year 28 of 2015 for PRN 10. DC was included for comparison. Linear trend has been removed.
Performance of Transformed Products
One of the metrics we can use to examine the performance of the transformed products is the quality of the solution in the position domain. The solutions were examined with respect to the time for convergence to a pre-defined threshold and position stability. We used five stations from the Scripps Orbit and Permanent Array Center (SOPAC) network for days 23 to 30 of 2015. These five stations were selected because of the regional nature of FCB products provided by SOPAC. We show the results for site Brand Basin (BRAN) on day-of-year 30 of 2015 as it reflects the performance of the whole dataset processed.
In FIGURES 6 to 8, we show the varying convergence periods at the site BRAN on day-of-year 30 for the “float” and “fixed” solutions using the different PPP-AR products, where fixed means the ambiguity-resolved solution and float the unresolved solution. Figure 6 uses the decoupled clock products, and the fixed solution performs as expected. After a few minutes, the solution attains the correct ambiguity candidate, and a fixed state is maintained.
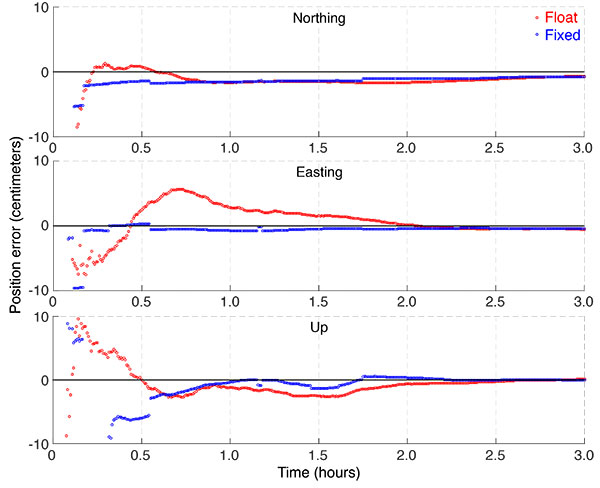
FIGURE 6. Position errors for site BRAN located in Burbank, Calif., on day-of-year 30 of 2015 illustrating the difference between the float and fixed solutions using the DC products.
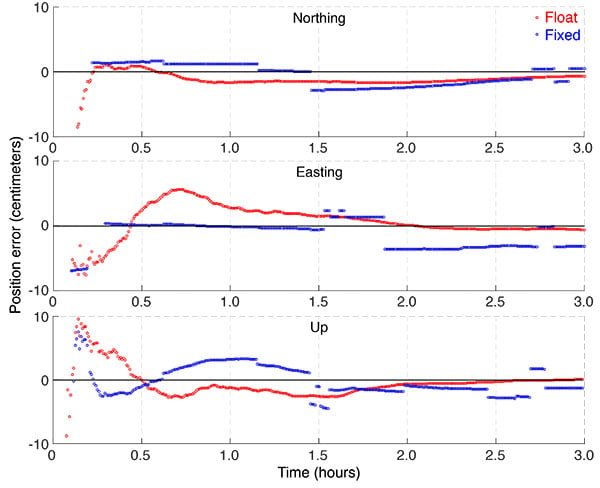
FIGURE 7. Position errors for site BRAN located in Burbank, Calif., for day-of-year 30 of 2015 illustrating the difference between the float and fixed solutions using the IRC products.
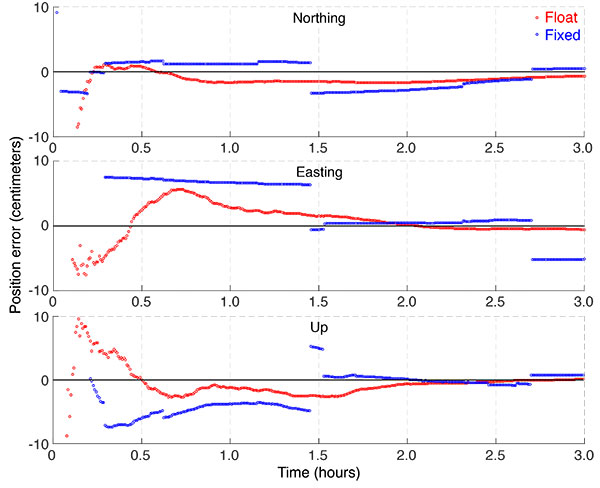
FIGURE 8. Position errors for site BRAN located in Burbank, Calif., for day-of-year 30 of 2015 illustrating the difference between the float and fixed solutions using the FCB products.
The performance of the fixed solution using the IRC products is depicted in Figure 7. Initial convergence is similar to the DC products in the northing and easting components where a fixed state is attained after a few epochs. In the up component, the solution quality deteriorates after 30 minutes. What is also easily visible is the solution sensitivity to changes in the satellite geometry. As the number of satellites changes, the fixed ambiguities change, causing datum shifts in the user solution.
Similar trends were also observed when the transformed FCB products were used, with the results presented in Figure 8. The solution deterioration is most evident in the easting component, as the incorrect integer candidate is selected.
Challenges of Interoperability
Interoperability of the various PPP-AR products is a challenging task because of the different qualities of the publicly available products, limited literature documenting the conventions adopted within the network solution of the providers, and unclear definitions of the corrections.
In TABLE 2, we summarize the various qualities of the products we used in the study, showing why it was challenging to perform a consistent comparison. IRC products were generated from a network of reference stations globally distributed and in real time. Similar to the IRC products, the DC products were generated from a global network of solutions, but post-processed, and the FCB products were based on a regional network of reference stations, but were available in real time. Post-processed orbits and clocks have an accuracy of ~2.5 centimeters and ~75 picoseconds, respectively, whereas the predicted half of ultra-rapid orbits and clocks have an accuracy of ~5 centimeters and ~3 nanoseconds, respectively. While it is evident in the existing literature that PPP-AR is possible in real time, the solution is rather sensitive to changes experienced by the PPP user solution, such as varying local conditions and satellite geometry. The sensitivity is illustrated in Figures 7 and 8 with solution jumps typically occurring when there is a change in the number of satellites.
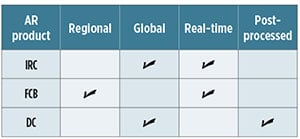
TABLE 2. Summary of the different quality of products provided by public providers to enable PPP-AR.
The general assumption when PPP-AR products are estimated within a network is that the PPP user would follow similar conventions when using the products. Consequences of different conventions adopted may result in incorrect ambiguities being resolved. For example, if inconsistent satellite antenna conventions were adopted between the network and user, then when phase wind-up corrections are applied, fractional cycles would be introduced. The introduced fractional cycles would result in incorrect ambiguities being resolved. FIGURE 9 shows the orientation of the spacecraft body frame for GPS Block IIR/IIR-M satellites adopted in the IGS axis convention (subplot (a)) and those provided in the manufacturer specifications (subplot (b)). The difference between the manufacturer specifications and IGS axis convention is the orientation of the x- and y-axes.
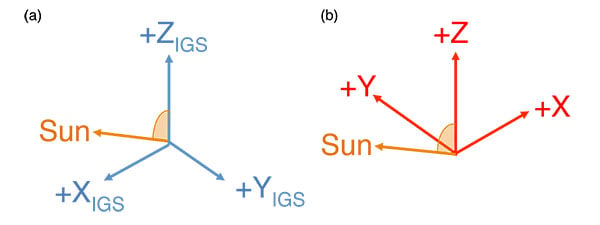
FIGURE 9. Orientation of the spacecraft body frame for GPS Block IIR/IIR-M satellites as (a) adopted within the International GNSS Service axis convention, and (b) those provided in the manufacturer specifications.
Conclusions
The mathematical model for the PPP user is similar for all PPP-AR products, as the different products contain the same information and, as a result, would allow for one-to-one transformations, allowing interoperability of the PPP-AR products. Interoperability of the various PPP-AR products would allow the PPP user to transform independently generated PPP-AR products to obtain multiple fixed solutions of comparable precision and accuracy. The ability to provide multiple solutions would increase the reliability of the solution such as in real-time processing: if there was an outage in the generation of the PPP-AR products, the user can instantly switch streams to a different provider.
We looked at the PPP-AR products provided by three organizations and examined position solutions for a set of stations in the SOPAC network with respect to convergence time to the pre-defined threshold and position stability.
Using the decoupled clock products, we found that the fixed solutions performed as expected. After a few minutes, a solution attains the correct ambiguity candidate and a fixed state is maintained. Unlike the fixed solutions using the decoupled clock products, instantaneous convergence was not attained in the horizontal and vertical components when the transformed IRC and FCB products were used. The ambiguity-resolved solutions were sensitive to changes in the satellite geometry. As the number of satellites change, the fixed ambiguities change, causing datum shifts in the user solution.
The unstable solutions from both transformed products are attributed to the magnitude of the relative satellite code and widelane clock errors. Additional refinement of the transformation model is required as the satellite hardware delay has not been completely mitigated. Mismodeling of the hardware delay was absorbed by the ambiguity terms, causing incorrect fixed solutions.
Future Research
Future prospective research includes refinement of the proposed transformation models to include the mismodeled effects, thus providing the user with a more reliable solution. The functional model needs to be further examined to ensure that the corrections were applied consistently. Further analysis of the instability of the user solution is required, as solution jumps typically occur when there are changes in the number of satellites tracked. Also to be analyzed are the post-fit residuals, to examine the effects of mismodeling. The temporal and spatial behavior of the estimated terms will be examined for the different products used to understand the unmodeled effects that introduce incorrect solution fixes. We would also consider increasing the number of reference stations to further test the reliability of the transformed products under varying user conditions.
Acknowledgments
We acknowledge Paul Collins, Jianghui Geng and Denis Laurichesse for our valuable discussions and their suggestions. The research was funded by the Natural Sciences and Engineering Research Council of Canada. The results we have presented were derived from data and products provided by Natural Resources Canada, Scripps Institution of Oceanography, Centre National d’Etudes Spatiales and the International GNSS Service.
This article is based on the paper “Examining the Interoperability of PPP-AR Products” presented at ION GNSS+ 2015, the 28th International Technical Meeting of The Satellite Division of the Institute of Navigation held in Tampa, Fla., Sept. 14–18, 2015.
GARRETT SEEPERSAD is a Ph.D. candidate at York University, Toronto, Canada, in the Department of Earth and Space Science and Engineering. He completed his B.Sc. in geomatics at the University of the West Indies and his M.Sc. in geomatics engineering at York University. His area of research currently focuses on the development and testing of PPP functional, stochastic and error-mitigation models.
SUNIL BISNATH is an associate professor in the Department of Earth and Space Science and Engineering at York University. His research interests include geodesy and precise GNSS positioning and navigation.
Further Reading
• PPP Ambiguity Resolution Techniques
“Review and Principles of PPP-RTK Methods” by P.J.G. Teunissen and A. Khodabandeh in Journal of Geodesy, Vol. 89, No. 3, 2014, pp. 217–240, doi: 10.1007/s00190-014-0771-3.
“A Novel Un-differenced PPP-RTK Concept” by B. Zhang, P.J.G. Teunissen and D. Odijk in Journal of Navigation, Vol. 64, Supplement S1, 2011, pp. S180–S191, doi: 10.1017/S0373463311000361.
“Isolating and Estimating Undifferenced GPS Integer Ambiguities” by P. Collins in Proceedings of the 2008 National Technical Meeting of The Institute of Navigation, San Diego, Calif., January 28–30, 2008, pp. 720–732.
“Resolution of GPS Carrier-Phase Ambiguities in Precise Point Positioning (PPP) with Daily Observations” by M. Ge, G. Gendt, M. Rothacher, C. Shi and J. Liu in Journal of Geodesy, Vol. 82, No. 7, 2008, pp. 389–399, doi: 10.1007/s00190-007-0187-4.
“Integer Ambiguity Resolution on Undifferenced GPS Phase Measurements and Its Application to PPP” by D. Laurichesse and F. Mercier in Proceedings of ION GNSS 2007, the 20th International Technical Meeting of the Satellite Division of The Institute of Navigation, Fort Worth, Texas, Sept. 25–28, 2007, pp. 839–848.
• PPP-AR Transformation Models
“Phase Biases for Ambiguity Resolution: From an Undifferenced to an Uncombined Formulation” by D. Laurichesse. An unpublished white paper, Oct. 2014.
• Precise Point Positioning Algorithms
Improved Convergence for GNSS Precise Point Positioning by S. Banville, Ph.D. dissertation, Department of Geodesy and Geomatics Engineering, Technical Report No. 294, University of New Brunswick, Fredericton, New Brunswick, Canada. Recipient of The Institute of Navigation 2014 Bradford W. Parkinson Award.
“Precise Point Positioning: A Powerful Technique with a Promising Future” by S.B. Bisnath and Y. Gao in GPS World, Vol. 20, No. 4, April 2009, pp. 43–50.




About the Author: Richard B. Langley
Richard B. Langley is a professor in the Department of Geodesy and Geomatics Engineering at the University of New Brunswick (UNB) in Fredericton, Canada, where he has been teaching and conducting research since 1981. He has a B.Sc. in applied physics from the University of Waterloo and a Ph.D. in experimental space science from York University, Toronto. He spent two years at MIT as a postdoctoral fellow, researching geodetic applications of lunar laser ranging and VLBI. For work in VLBI, he shared two NASA Group Achievement Awards. Professor Langley has worked extensively with the Global Positioning System. He has been active in the development of GPS error models since the early 1980s and is a co-author of the venerable “Guide to GPS Positioning” and a columnist and contributing editor of GPS World magazine. His research team is currently working on a number of GPS-related projects, including the study of atmospheric effects on wide-area augmentation systems, the adaptation of techniques for spaceborne GPS, and the development of GPS-based systems for machine control and deformation monitoring. Professor Langley is a collaborator in UNB’s Canadian High Arctic Ionospheric Network project and is the principal investigator for the GPS instrument on the Canadian CASSIOPE research satellite now in orbit. Professor Langley is a fellow of The Institute of Navigation (ION), the Royal Institute of Navigation, and the International Association of Geodesy. He shared the ION 2003 Burka Award with Don Kim and received the ION’s Johannes Kepler Award in 2007.


Subscribe to GPS World
If you enjoyed this article, subscribe to GPS World to receive more articles just like it.






Follow Us